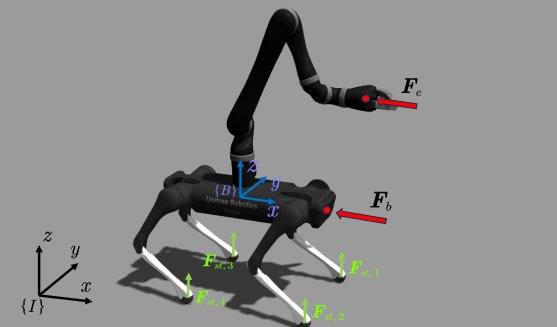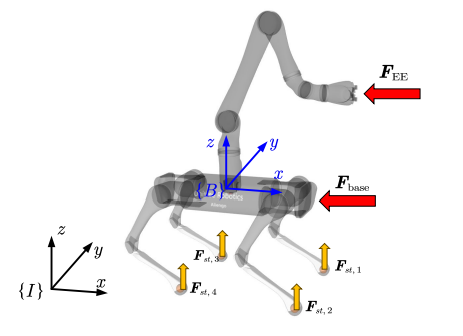
Transformer Observer-Based Contact Force Estimation for Quadruped Manipulators with Model Uncertainties
IEEE Robotics and Automation Letters , 2025
I am Zhang Tianlin (张天霖), a Ph.D. student at The Chinese University of Hong Kong, advised by Prof. Liu Yun-Hui in the Legged Robot Lab.
My research focuses on whole-body control, multi-contact planning, and other related topics in robotics. Some of my work can be found on Youtube and Bilibili (for viewers in China).
Before starting Ph.D., I earned a Master’s degree from Harbin Institute of Technology, Shenzhen (2024), where I was advised by Prof. Xiong Xiaogang and conducted research on loco-manipulation for quadruped manipulator robots. Prior to that, I graduated summa cum laude with a Bachelor’s degree from Changsha University of Science and Technology (2021), where I worked on visual servoing for aerial manipulator robots under the supervision of Prof. Zhang Hui and Prof. Zhong Hang.
For the up-to-date publication list, please visit the Google Scholar page.
IEEE Robotics and Automation Letters , 2025