硕士学位论文仿真与实验验证
Published in 哈尔滨工业大学深圳校区, 2024
论文
张天霖. 基于视觉伺服与集值反馈的四足机械臂动态物体抓取研究[D]. 哈尔滨: 哈尔滨工业大学, 2024.
Notes: 可以通过哈尔滨工业大学图书馆和深圳大学城图书馆搜索查询。
章节3 四足机械臂腿臂协同控制器设计
3.4 仿真验证
实验代码:https://github.com/skywoodsz/qm_control
实验视频:(点击查看) 
3.5 实验验证
实验代码:https://github.com/skywoodsz/qm_control/tree/feature-real
实验视频:(点击查看) 
章节4 四足机械臂视觉伺服自主控制
4.4 仿真验证
实验代码:https://github.com/skywoodsz/qm_visual
实验视频:(点击查看) 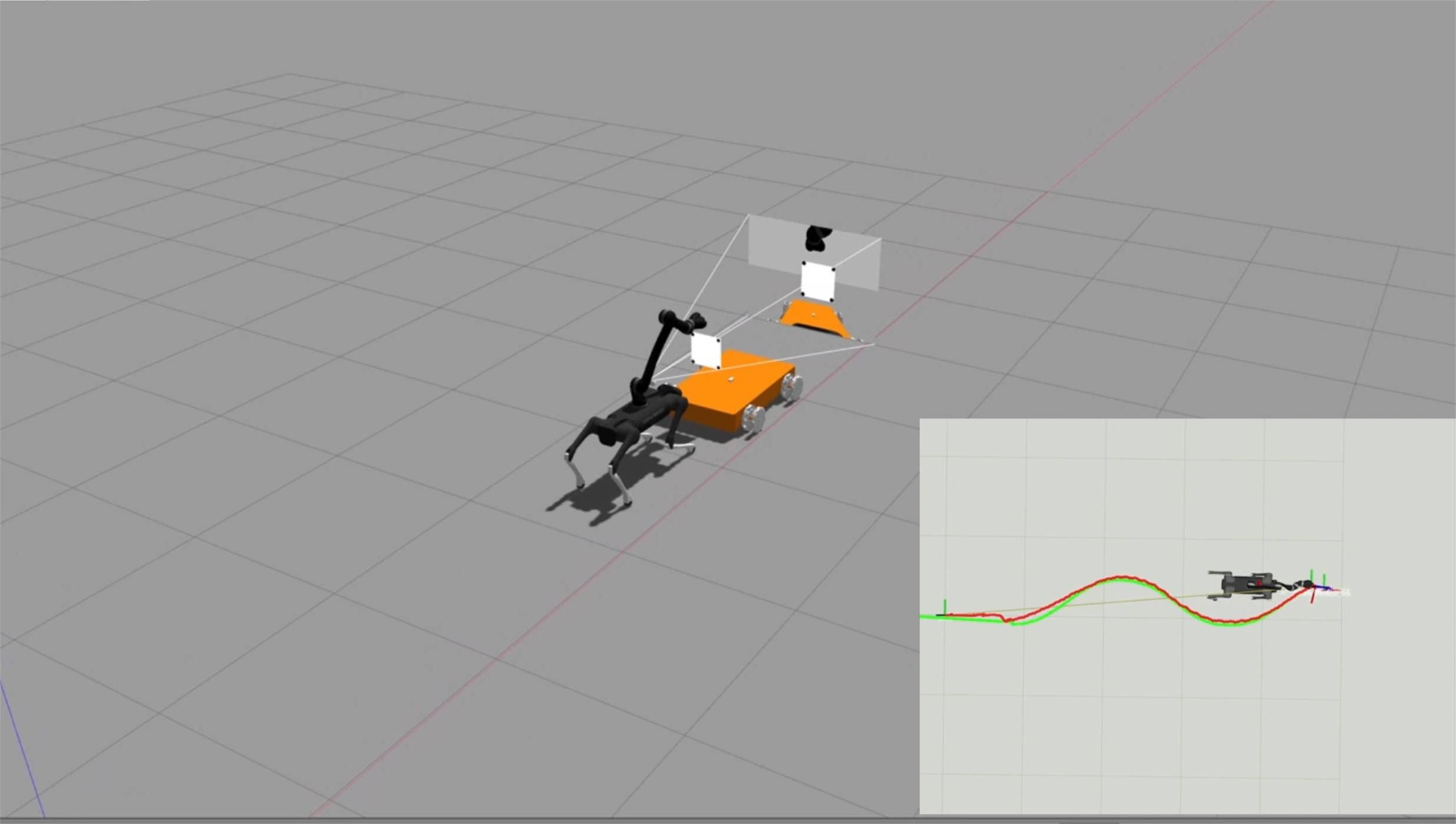
4.5 实验验证
实验代码:https://github.com/skywoodsz/qm_visual
实验视频:(点击查看) 
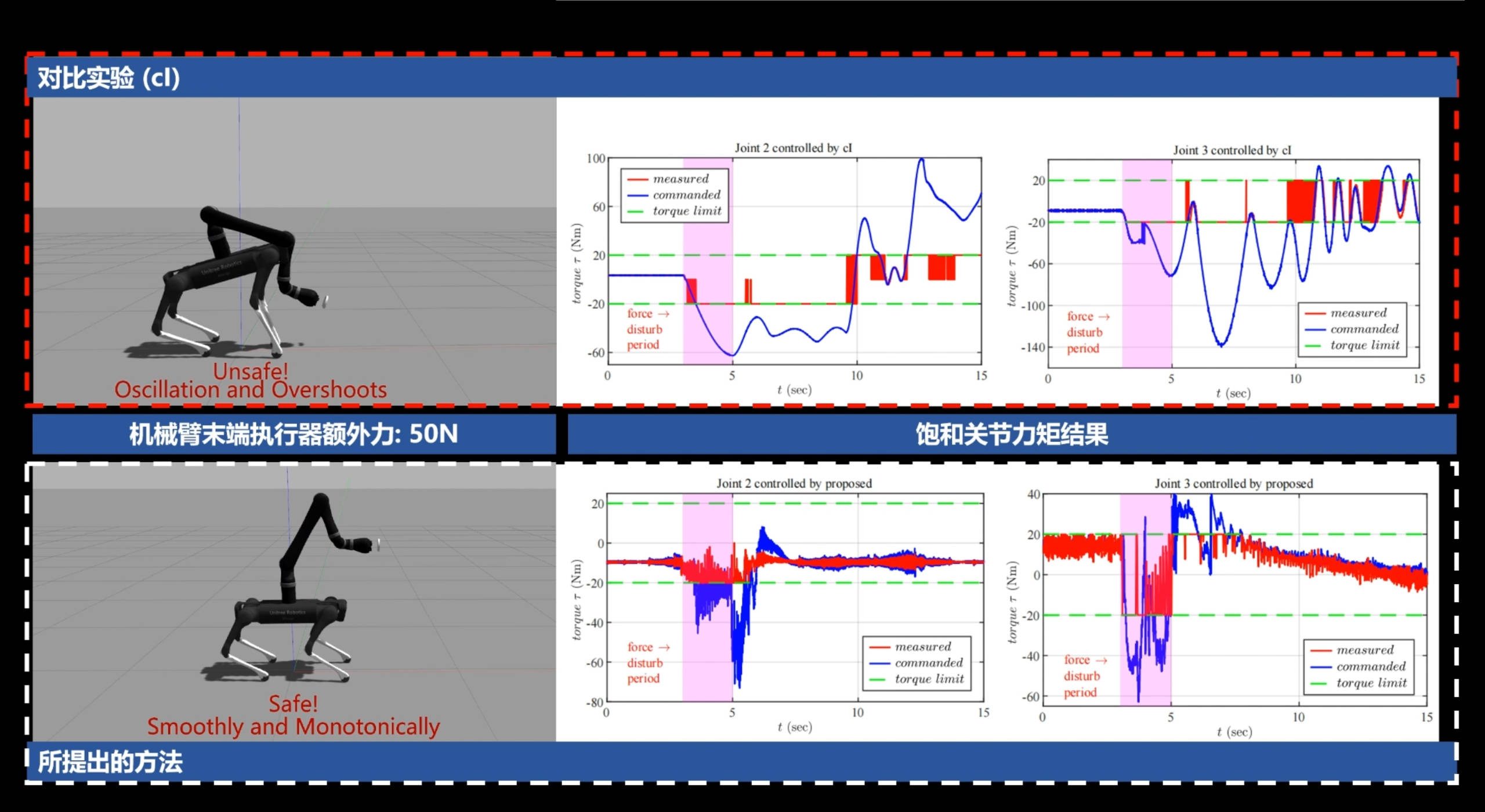
章节5 基于集值反馈的四足机械臂全身柔顺控制
5.5 实验验证
实验代码:https://github.com/skywoodsz/qm_control/tree/feature-compliance
实验视频:(点击查看)