
Projects
qm_control: a MPC and WBC framework for quadruped manipulator
Harbin Institute of Technology, Shenzhen , 2024
legged_slam: a SLAM framework for legged robot
Harbin Institute of Technology, Shenzhen , 2024
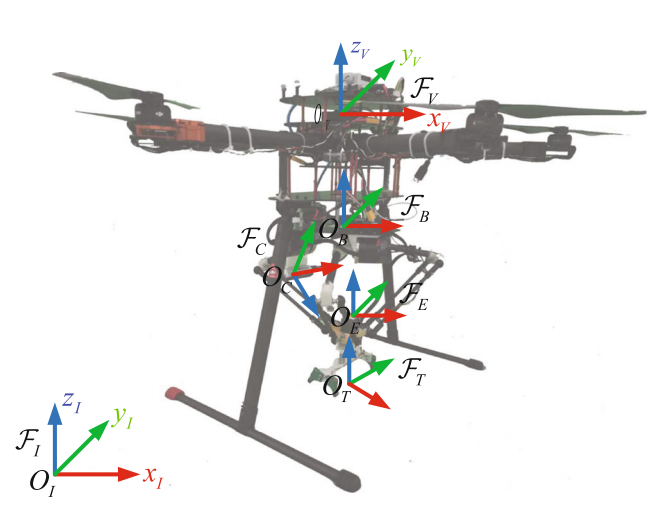
Aerial manipulator: vision servo for aerial manipulator
National Engineering Research Center of Robot Vision and Control , 2021
