Sitemap
A list of all the posts and pages found on the site. For you robots out there, there is an XML version available for digesting as well.
Pages
Posts
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Headings are cool
You can have many headings
Aren’t headings cool?
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Headings are cool
You can have many headings
Aren’t headings cool?
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Headings are cool
You can have many headings
Aren’t headings cool?
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Headings are cool
You can have many headings
Aren’t headings cool?
portfolio
projects

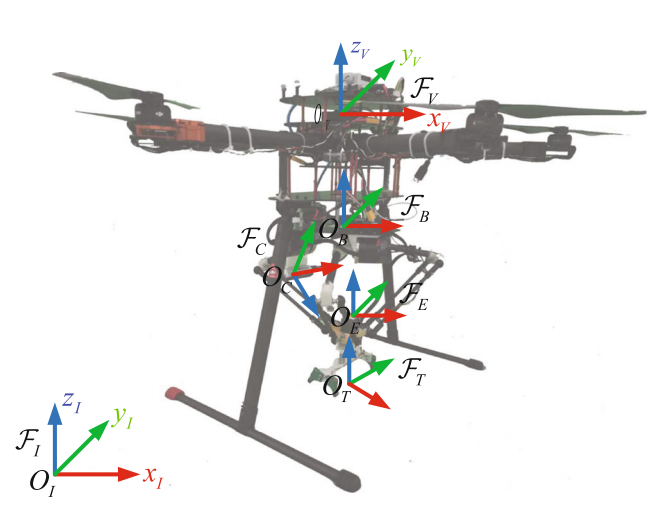
Aerial manipulator: vision servo for aerial manipulator
National Engineering Research Center of Robot Vision and Control , 2021
legged_slam: a SLAM framework for legged robot
Harbin Institute of Technology, Shenzhen , 2024
qm_control: a MPC and WBC framework for quadruped manipulator
Harbin Institute of Technology, Shenzhen , 2024

publications
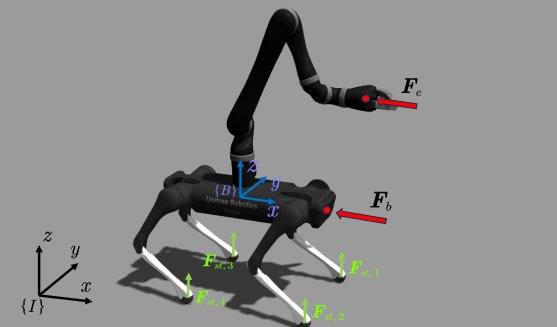
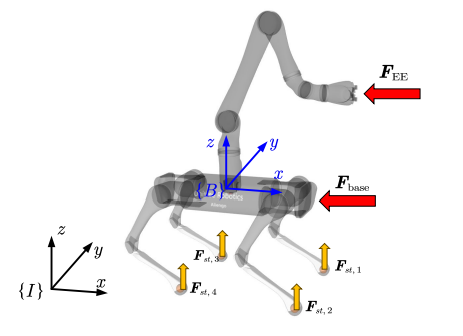
Transformer Observer-Based Contact Force Estimation for Quadruped Manipulators with Model Uncertainties
IEEE Robotics and Automation Letters , 2025
talks
Published:
This is a description of your talk, which is a markdown file that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your tutorial, note the different field in type. This is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
teaching
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Heading 1
Heading 2
Heading 3
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.